Příklad využití software Ansys na Fakultě elektrotechnické na ČVUT v Praze
Výuka moderních přístupů k návrhu elektrotechnických systémů pomocí metody konečných prvků FEM pro budoucí inženýry.
Příklad využití software Ansys na Fakultě elektrotechnické na ČVUT v Praze
Součástí moderního postupu při návrhu elektronických systémů jsou analýzy a jejich funkce založené na metodě konečných prvků FEM. Analytické návrhy vycházejí mnohdy z příliš zjednodušujících modelů, které nepostihnou chování systému či jeho jednotlivých komponent v plné šíři. Následně pak při provozu tohoto zařízení může dojít k nečekaným interakcím mezi jednotlivými komponentami systému vedoucími k jeho havárii a poškození.
Součástí výuky budoucích inženýrů by měly být i moderní postupy při návrhu strojů. Touto myšlenkou se řídí naše firma TechSoft Engineering. Spolupracujeme s českými technickými univerzitami na šíření povědomí o možnostech simulací pomocí FEM řešičů a jejich přínosu při návrhu technických zařízení.
Jednou z našich aktivit je výuka moderních postupů při návrhu elektrických strojů, elektrických pohonů a jejich napájení. Toto téma jsme rozdělili do 3 přednášek popisujících návrh a optimalizaci strojů pomocí metody konečných prvků. Jedná se o:
1) Návrh 3f distribučního transformátoru se sníženými ztrátami
2) Návrh 3f asynchronního motoru
3) Dimenzování pohonu bateriového elektromobilu BEV dle cyklů WLTP

Obr. 1: Úvodní slide přednášky zabývající se dimenzováním elektrického pohonu BEV.
Všechna 3 vyučovaná témata jsou založena na popisu klasickou metodou analytických vztahů návrhu stroje či celého pohonu a optimalizace jeho pracovních charakteristik pomocí metody konečných prvků v softwarech Ansys. Obsah jednotlivých přednášek je dále rozepsán.
1) Návrh 3f distribučního transformátoru se sníženými ztrátami
V poslední době došlo k výraznému pokroku ve vývoji nových feritových materiálů, které dosahují vysoké pracovní hodnoty magnetické indukce B (T) při malých měrných ztrátách ∆P1,5 (W/kg) v magnetickém obvodu. To umožňuje návrh nových distribučních transformátorů se sníženými ztrátami.
Distribuční transformátory jsou typicky provozovány při výrazně nižších hodnotách zdánlivého výkonu, než jsou jejich jmenovité hodnoty. Při malých hodnotách zátěže se výrazně zvyšuje podíl ztrát naprázdno ∆P0 v magnetickém obvodu vůči ztrátám ve vinutí ∆Pk.
Analytickými metodami lze navrhnout parametry magnetického obvodu a vinutí transformátoru, spočítat ztráty, síly působící na vinutí způsobené nesymetrií uložení vinutí či při zkratu nebo úderu blesku, spočítat oteplení vinutí a magnetického obvodu. Tyto vztahy mají jistá omezení (tvary geometrie magnetického obvodu, materiálové vlastnosti používané v dané době, používané poměry rozměrů, …) a ne vždy plně popisují děje probíhající v transformátoru. Proto je potřeba provést kontrolu návrhu a případnou optimalizaci parametrů transformátoru pomocí metody FEM.
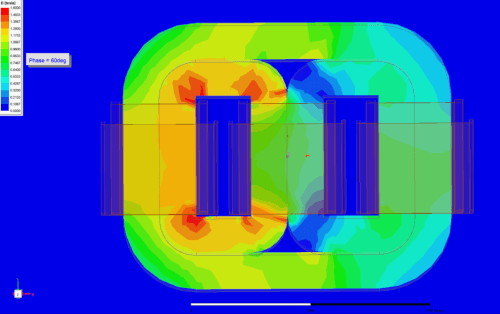
Přínos využití metody FEM je názorně vidět na obr. 2., který zobrazuje rozložení magnetické indukce B. Zamýšlený pracovní bod navrženého transformátoru je při magnetické indukci B=1,3.Při požadovaném napájení však dochází k přesycení jádra a magnetická indukce je v některých oblastech výrazně vyšší (červená barva). Proto je potřeba parametry navrženého transformátoru předělat.
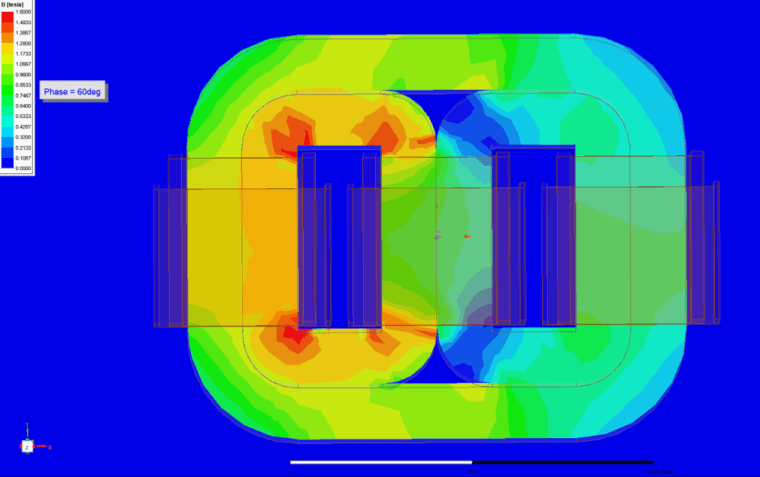
Obr. 2: Rozložení magnetické indukce B
Zvýšení magnetické indukce B, vliv rozložení vinutí a geometrie způsobují také vyšší dodatečné ztráty. To vše lze analyzovat a popřípadě optimalizovat pomocí softwaru Ansys Maxwell pro řešení nízkofrekvenčních elektromagnetických dějů. Celý výše uvedený postup si studenti sami prakticky vyzkoušeli.
2) Návrh 3f asynchronního motoru
S rostoucími nároky na ekologii přicházejí i nové normy a nařízení komise EU pro zvýšení účinnosti elektrických motorů. S tím souvisí i optimalizace již navržených strojů a jejich vylepšování. Podobně jako u transformátorů, existuje i u elektrických motorů celá řada postupů návrhu stroje založených na analytických vzorcích.
Nové elektrotechnické materiály umožňují výrobu elektrických točivých strojů s vyšší účinností a lepšími pracovními parametry. Nicméně tím se mění i klasický způsob analytického návrhu stroje. K tomu slouží software Ansys RMxprt (analytický návrhář elektrických strojů točivých) a navazující FEM software Ansys Maxwell (nízkofrekvenční EM řešič). Tyto softwary umožňují kontrolu správnosti EM návrhu stroje a případnou optimalizaci pro zlepšení jeho pracovních parametrů. Dále na to navazují analýzy termální a mechanické.
Optimalizovat lze řadu částí návrhu, od geometrie statoru a rotoru, přes počet závitů vinutí a průřezy vodičů, počet drážek a geometrii zubů, až po materiálové vlastnosti magnetického obvodu a vinutí. Úkolem studentů je navrhnout 3f asynchronní motor 2pólový napájený napětím do 600 V o frekvenci 50 Hz, který splňuje energetickou třídu IEC3, tudíž jeho minimální účinnost je 95,8 %.
Na obr. 3. Je zobrazen průběh výkonu a účinnosti navrženého motoru klasickou analytickou metodou. Obr. 4 zobrazuje optimalizovaný návrh pomocí softwaru Ansys RMxprt. Celkové porovnání jmenovitých pracovních parametrů je pak zobrazeno na obr. 5a pro analytický návrh a 5b. pro optimalizovaný návrh.
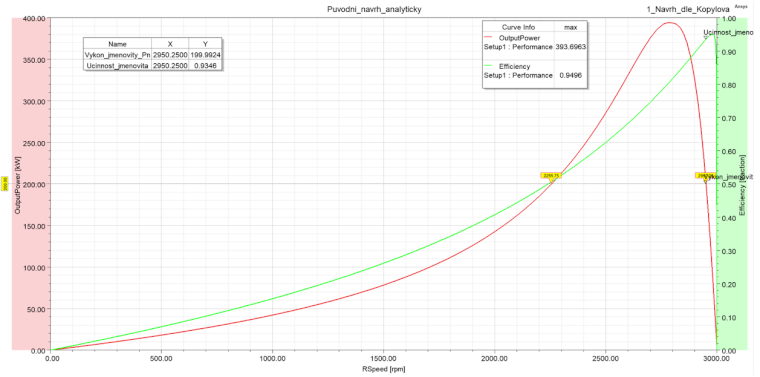
Obr. 3: Průběh výkonu a účinnosti klasicky navrženého 3f asynchronního motoru
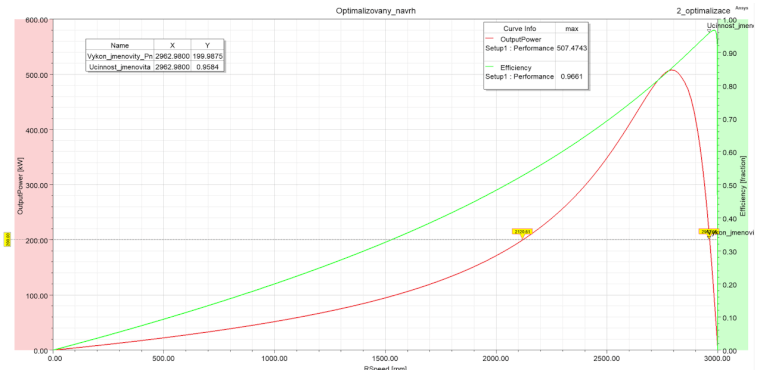
Obr. 4: Průběh výkonu a účinnosti optimalizovaného 3f asynchronního motoru
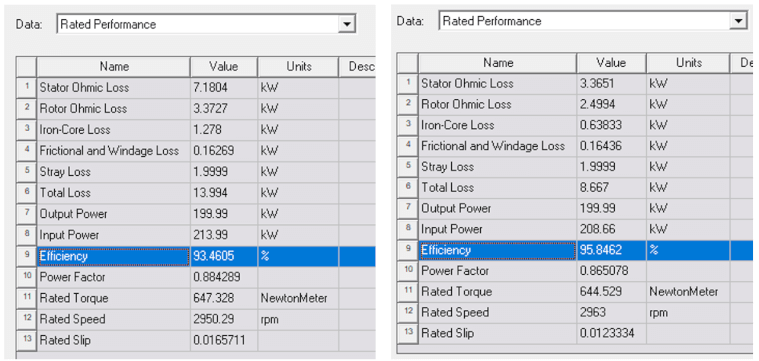
Obr. 5a. Jmenovité parametry analytický návrh Obr. 5b. Jmenovité parametry optimalizace
Analytický návrh 3f asynchronního motoru 200 kW nabízí poměrně dobré parametry, nicméně není schopen splnit nové podmínky energetické třídy. Díky několika úpravám modelu, jako je snížení počtu závitů, změna rozměru drážek statoru/rotoru a zvětšení průřezu tyčí zvýší účinnost o 2,4 % a splní požadovanou energetickou třídu IEC3.
3) Dimenzování pohonu bateriového elektromobilu BEV dle cyklů WLTP
Správně dimenzovat elektrický pohon a zvolit vhodné komponenty, které ho tvoří, znamená volit nejen parametry jednotlivých komponent ale i jejich vzájemnou interakci. Specifikum pohonu pro automobil je výrazně proměnná zátěž v čase, kdy automobil musí být schopen splnit jízdní cykly určené normou. V Evropě se využívá jízdních cyklů WLTP, definovaných pro jednotlivé typy vozidel.
Dimenzování celého pohonu závisí na schopnosti dodat dostatečný mechanický hnací moment motoru, aby byla splněna rovnost působících sil na vozidlo. Součet sil a jízdních odporů, se musí pro splnění pohybové rovnice rovnat Fdrive+Froll+Fa+Faero+Frise+Fcurve = 0. Jednotlivé jízdní odpory jsou valivý odpor Froll, odpor ze zrychlení Fa, odpor ze stoupání Frise, odpor jízdy v oblouku Fcurve a tažná síla Fdrive pohánějící celý automobil. Obr. 6.ilustruje síly působící na jedoucí elektromobil.
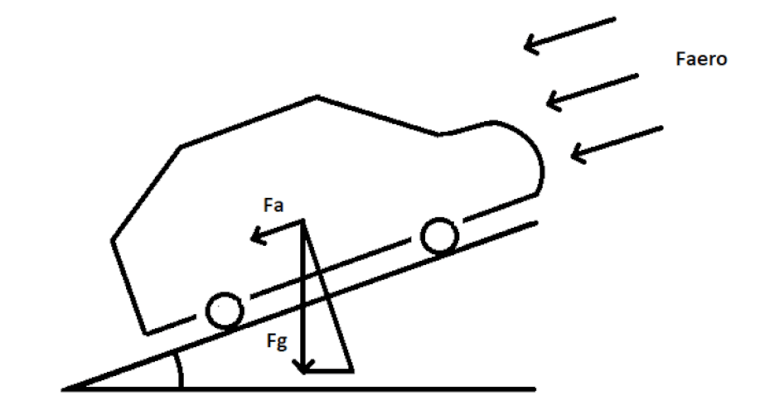
Obr. 6: Síly působící na jedoucí elektromobil
Protože jsou tyto jízdní odpory proměnlivé dle profilu tratě a požadovaného jízdního cyklu řidiče, je potřeba stanovit ekvivalentní mechanický výkon pohonu a střední hodnotu ztrát pro dostatečné dimenzování pohonu z hlediska elektrických a mechanických komponent i jejich chlazení.
Elektrický pohon BEV vozidla se skládá z mnoha komponent od elektrického motoru, výkonových měničů napájejících motor, přes řídící elektroniku až po zdroj napájení v podobě bateriových packů. Všechny tyto komponenty se vzájemně ovlivňují. A pro věrnou simulaci chování celého pohonu je potřeba co nejpřesněji popsat jejich chování. To lze udělat buď co-simulací s 3D FEM modely, která je časově náročná a při velkém množství modelů i neupočitatelná, či využít redukované modely ROM, které velmi dobře popisují chování 3D FEM modelu ve spočtených mezích a přitom jsou výpočetně nenáročné a schopné dát odpověď prakticky okamžitě.
Propojením těchto ROM modelů s 1D analytickými modely lze simulovat celý elektrický pohon BEV vozidla v závislosti na proměnném jízdním cyklu a trati vozidla. A získat tak informace o zatěžování motoru, jeho chlazení či o aktuálním stavu bateriového packu a jeho teplotě.
Na obr. 7. Je vidět průběh jízdního cyklu a tažné či brzdné síly pro splnění jízdního cyklu WLTP. Jednotlivé síly působící na vozidlo jsou vidět na obr. 8. Obr. 9. zobrazuje ohřev a chlazení jednotlivých částí elektromotoru vlivem ztrát během jízdy.
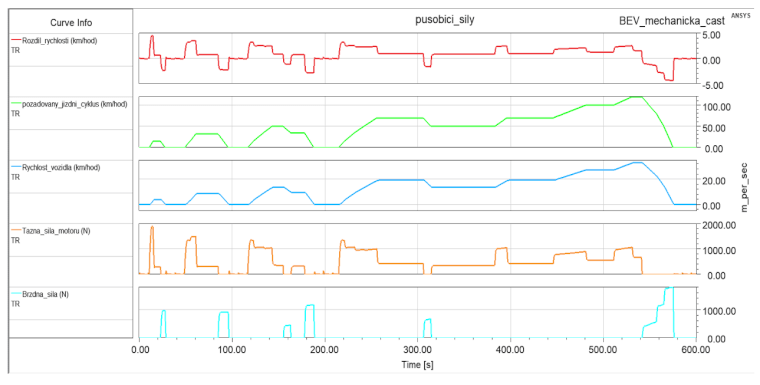
Obr. 7. Tažná a brzdná síla působící na vozidlo během WLTP cyklu
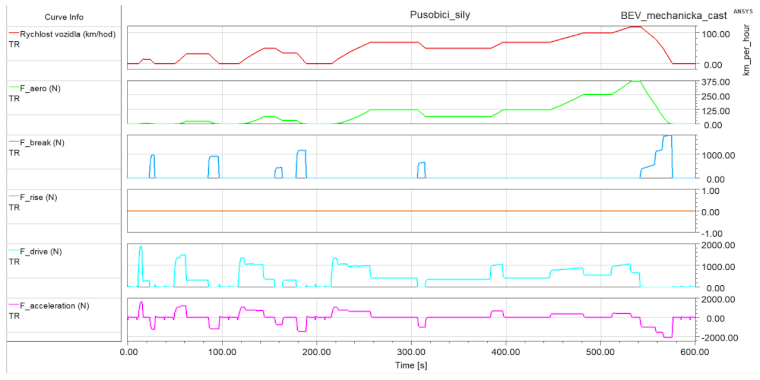
Obr. 8. Jízdní odpory působící na elektromobil během WLTP cyklu
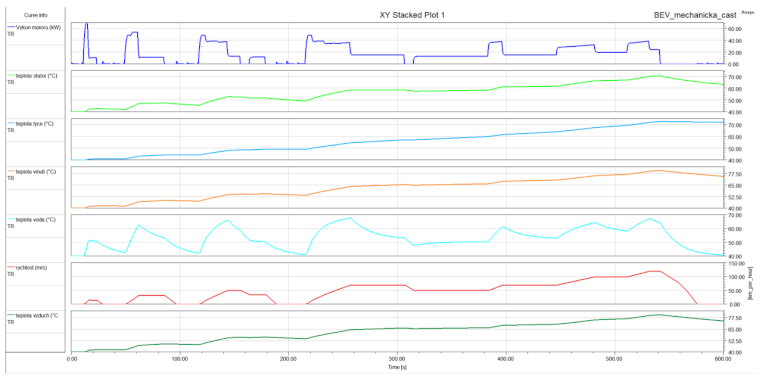
Obr. 9. Chlazení elektrického motoru, průběh teplot částí motoru
Pomocí těchto simulací a jejich výsledků pak lze rozhodnout, zda navržený elektrický pohon a jeho komponenty jsou schopny splnit požadavky normy nebo zákazníka a dodat dostatečný požadovaný hnací výkon vozidlu BEV. Příprava modelů systémové simulace je časově náročná, proto studenti si vyzkouší alespoň část, a to připravit model napájení asynchronního motoru řízeného SVPWM (space vector PWM) zatěžovaného proměnným mechanickým momentem v čase.
Autor: Radek Fajtl
Další články
Využití PyFluent a strojového učení pro udržitelné zpracování materiálů
Tento článek odhaluje, jak mohou moderní technologie a kreativní přístup přispět k vývoji ekologičtějších výrobních…
Zlepšete své simulace pomocí modelů redukovaného řádu a digitálních dvojčat
V dynamické oblasti inženýrských simulací zůstává dosažení efektivity a přesnosti neustálou výzvou.
Efektivní využití restartování analýzy v prostředí Ansys Mechanical
Článek se zabývá možnostmi restartování analýz v softwaru Ansys Mechanical, které umožňují efektivnější správu…